


社会性昆虫の行動解析とモデル化~トゲオオハゲアリの集団における相関~
結城 麻衣(a)、林 叔克(a,b)、菅原 研(a)
a 東北学院大学教養学部情報科学科
b NPO法人 natural science
概要
社会性昆虫であるアリは、コロニー全体として、ひとつの個体のように振る舞うという集団行動を行っている。本研究の目的は社会性昆虫であるアリの集団行動を2匹からの行動を解析することで、明らかにすることである。数匹のアリが未知な空間を探索するときに、アリ同士がどのような行動をしているのかを定量化した。結果、アリのフェロモンによるマーキングや、2匹、3匹のアリにおける相互作用が明らかになった。
1 はじめに
社会性昆虫であるアリにおいて巣から餌まで列を成して群れで動いている様子が観察される。 人が同様の人数で列を成した場合、誰かしら指示をしなくてはきれいに列を作るのは難しい。しかし、アリは指示者がいないにも関わらず、自然と列を成して歩いている。ましてや、数百匹といる巣の中ですら、管理者が一匹もいないのに、見事にアリ社会が成り立っている。女王アリが指示していると考えることもできるが、女王の主な役割は産卵であり、働きアリの行動を完全にコントロールする中央司令室のような存在ではないことが知られている。では、どうしてアリ社会における協調性が見事に構成されているのだろうか。
コロニー全体の機能を研究する方向性もあるが、本研究では、2匹からの働きアリ同士のコミュニケーションを出発点に実験を行った。
2 実験および解析手順
本研究で用いたアリはトゲオオハリアリ(学名:Diacamma)である。体長1cmほどで20~400個体で1コロニーを形成するため、個体間コミュニケーションとコロニーの振る舞いを同時に見ることができる種である。
アリは縁や狭いところに沿って歩く性質を有する。従って、角や縁のある正方形の実験フィールドで行動観察を行った場合、最終的には隅にとどまるという傾向がある。境界の影響をできるだけ少なくことを考え、実験フィールドとして直径30cmの半球型のアクリルボウルを使用した。
なお画像解析を容易にするために外側を紙粘土でコーティングした。
2-1.実験手順
(1) アリから分泌され化学物質の影響をなくすために、実験前にエタノールでフィールドを拭き、30分以上おく。
(2) 飼育している箱から実験フィールドにアリを移し、フィールドに蓋をして真上からビデオカメラで録画する。観察時間は約4時間とした。
図1:半球内にいるアリの様子
2-2.解析法
アリ同士のコミュニケーションの有無を調べるために、軌跡、移動速度、アリ同士の個体間距離などを解析する。軌跡の抽出手順を以下に示す。
(1) 録画映像から単位時間毎に静止画を抽出
(2) 2値化、フィルタリングにより座標を算出
(3) 座標を元にアリの軌跡を計算
3 結果と考察
3-1.2匹のアリ同士のコンタクト
2匹のアリをアクリルの半球に入れた時間をゼロとして、軌跡、移動速度、個体間距離を測る。図2は2匹のアリの軌跡を重ねたものである。楕円で囲った部分に、2匹の軌跡が集中していることが見られる。この結果から2匹のアリは局所的な場所に集まってくるものと思われる。
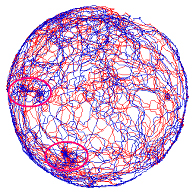
図2:2匹のアリの軌跡
2匹のアリの60分ごとの軌跡をみると、 (1)ゼロ-60分:半球の表面を活発に探索。 (2)60-120分:アリの軌跡は局在化し始め、あるスポットを中心に2匹が集まる様子がみられる。 (3)120-180分:さらに局在化が進み、ある地点を中心に行動する様子がみられる。行動はやや不活発になる。 (4)180-240分:さらに不活発になり、ある地点に2匹のアリがとどまるようになる。 2匹のアリの個体間距離を二値化したものを図3に示す。集合と離散を繰り返している様子が観察される。新しい環境に入れられた2匹のアリは最初、頻繁に集合と離散を繰り返すが、次第に集合している時間間隔が長くなるのがわかる。
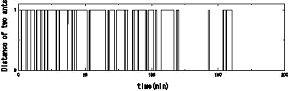
図3:2匹のアリの個体間距離:2匹のアリがコンタクトしている時を0、離れている時を1としている
3-2 3匹のアリ同士のコンタクト
3匹のアリにおけるコンタクトの数の時間変化を観察した。アリ同士がコンタクトを取ったときを1と数え、A-B,B-C,C-Aの最大3ボンドでカウントを取った。3匹のアリにおけるコンタクトの数は、0から3までがありうるが、図4に見られるようにコンタクトの数は1が多かった。つまり、アリは2個体でコンタクトを取ることが情報交換のベースになっていると思われる。
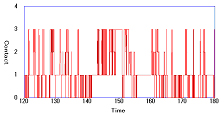
図4:経過時間におけるコンタクトの数の変化
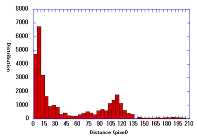
図5:3匹のアリ同士の距離の分布図
図5は120分から180分の間における2匹のアリの間の距離の分布である。8ピクセル(1個体距離)のところにピークが見られる。これは2匹のありがコンタクトをしている距離である。また60ピクセル(10個体距離)のところに極小が見られるが、これはアリとアリの間の距離において、ある一定の距離以下になると、コンタクトを行うためと考えられる。 以上の結果と他のデータから、アリは他のアリと一定の距離空間を持ち(以下パーソナルスペースと言う)、パーソナルスペースにアリ同士がはいれば、2匹間でコンタクトを取ると思われる。観察によると、あるアリが別のアリのパーソナルスペースに入ると、一気に近づきコンタクトを取り始める。一方、3匹目のアリを入れた場合は、2匹のアリと3匹目のアリの間に斥力が働いているかのような相互作用が見られた。
4 おわりに
本稿では、観察から①少数個体のアリは局所的に集合すること、②アリのコンタクトは2匹を基本としていること、③コンタクトをとる判断をするようなアリの間の距離が見られること、を示した。今後は3匹のアリに働く相互作用に関する仮説を検証する実験を行っていく予定である。
参考文献
[1]Deborah M.Gordon(池田訳):「アリはなぜ、ちゃんと働くのか」、新潮社(2001).
[2]菅原、辻:「社会的適応行動から学ぶ群ロボット」、計測と制御、Vol.46,No.12 (2007)pp.928-933.
※2008年2月15日 平成19年度 第5回情報処理学会東北支部研究会にて




















