


サーボモータをどのように制御するか
文責:佐瀬 一弥 (2008年11月20日)
カテゴリ:AVRマイコン TIPS集(38)
サーボモータの制御
失敗したこと
データシートでサーボモータの端子の確認をしなかったため。 先週の内容が無駄になった。サーボモータには制御回路が必要ない。 3つの端子はそれぞれ、グラウンド、電源、信号線となっており、 マイコンからの電気信号と外部電源のみで作動できる。 端子(コネクタ)には、ある程度規格が決まっていて、今回使うものは、写真のようになっている。
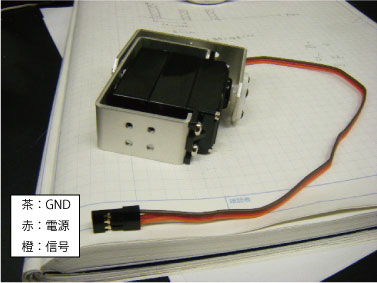
サーボモータ
制御方法
周期的なパルス波で位置決めができると思っていた。
しかし、ファンクションジェネレータで方形波を出力し、信号として与えてみたところ、
一定の位置で止まるが、方形波の周期とモータの角度の相関がわからなかった。
調べたところ、波長を一定にして、パルス波の幅を変化させることで、角度を調整するようである。
波長は10msくらい。つまり、PWM制御で位置を制御するということになる。
今までは、DCモータの速度制御に使っていた制御だが、サーボモータでは角度制御になる。
パルス幅と周期
今後の予定
マイコンでパルス幅aを変化させ、角度との関係を調べる。





























