


2関節マニピュレータの逆運動学
文責:佐瀬 一弥 (2009年7月21日)
カテゴリ:LabVIEW TIPS集(47)
下の図のような2関節マニピュレータを考える。
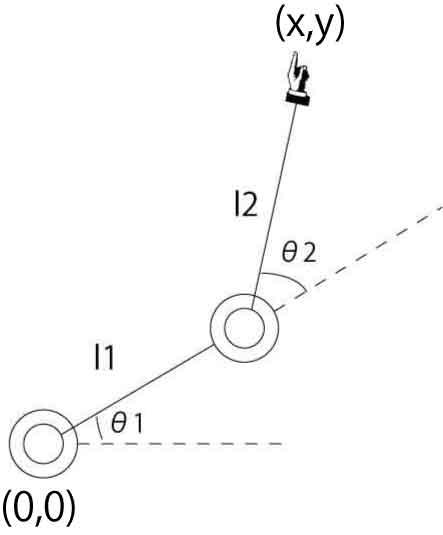
関節の回転角度\theta_1,\theta_2から手先の位置(x,y)を
求める(順運動学)のは簡単だが、
手先の位置に合わせるように回転角度を決める(逆運動学)のは
めんどうな計算が必要になる。
今回の設定では次式が導びかれる。
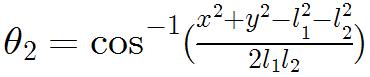

もうひとつ解があるが、今回はこの式によるマニピュレータの挙動を LabVIEWで計算して確かめた。
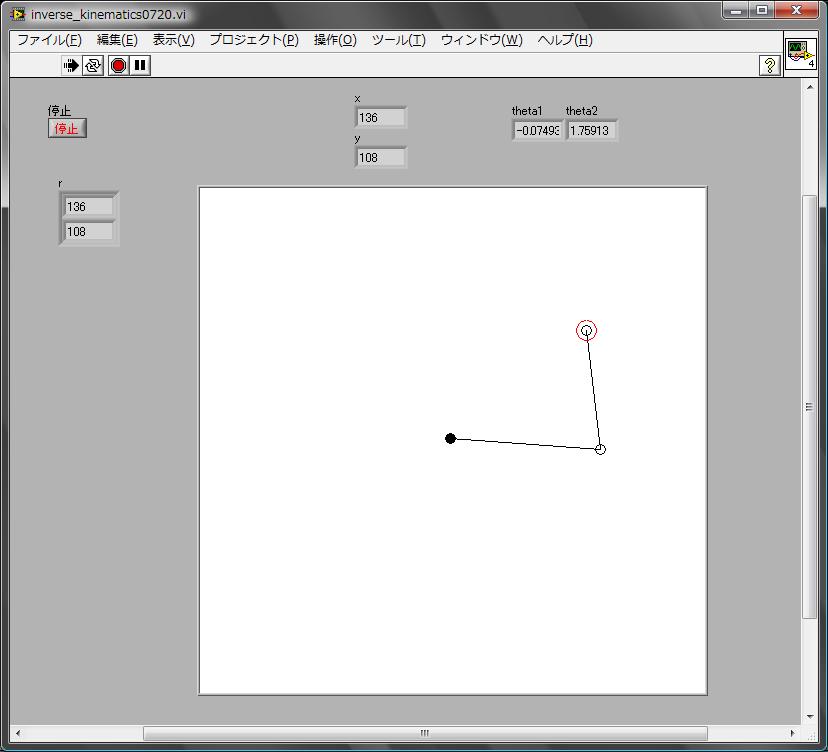
プログラムはこちら。最初に描画される円の中心をクリックすると開始し、手先がマウスの
位置を追いかけます。
inverse_kinematics.vi




























